7 个版本
| 0.1.0 | 2023 年 3 月 31 日 |
|---|---|
| 0.0.7 | 2022 年 12 月 9 日 |
| 0.0.6 | 2021 年 7 月 1 日 |
| 0.0.5 | 2021 年 3 月 29 日 |
| 0.0.3 | 2021 年 2 月 19 日 |
#27 in 机器人
每月下载 27 次
375KB
8K SLoC
openrr: Open Rust Robotics
![]()
![]()
![]()
面向开发者和未来用户
OpenRR(发音为“opener”)是 Open Rust 机器人平台。
它处于高度开发中。
支持的平台
| 操作系统 | 核心 | 图形用户界面 | ROS | ROS2 |
|---|---|---|---|---|
| Linux (Ubuntu) | ✔ | ✔ | ✔ | ✔ |
| MacOS | ✔ | ✔ | ✔ | |
| Windows | ✔ | ✔ |
- 在 Linux/MacOS 上,您可以在不安装 ROS 的情况下使用 ROS。
- ROS2 支持是实验性的。有关详细信息,请参阅 arci-ros2。
依赖关系
Linux
sudo apt install cmake build-essential libudev-dev xorg-dev libglu1-mesa-dev libasound2-dev libxkbcommon-dev
- cmake build-essential (openrr-planner (assimp-sys))
- libudev-dev (arci-gamepad-gilrs)
- xorg-dev libglu1-mesa-dev libxkbcommon-dev (openrr-gui (egui))
- libasound2-dev (arci-speak-audio)
架构
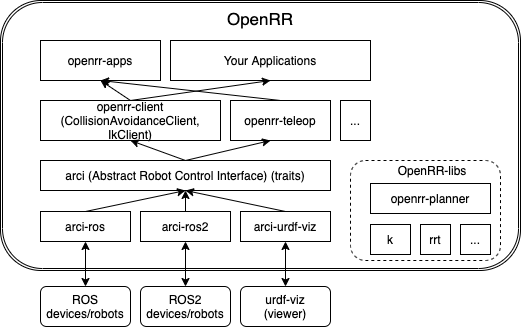
arci 是 openrr 的硬件抽象层。目前实现了 ROS1 和 urdf-viz(作为一个静态模拟器(实际上它只是一个查看器))。
如果您使用 arci 特性,则可以编写平台/硬件无关的代码。
OpenRR 是什么?
OpenRR 包含..
- 抽象机器人接口 (
arci) - 接口的具体实现 (
arci-ros、arci-urdf-viz,...) - 使用接口的库 (
openrr-client,...) - 工具 (
openrr-apps) - 纯库,与
arci无关 (openrr-planner,...)
工具
目前我们有一些工具可以控制真实的/模拟机器人。
有关详细信息,请参阅 openrr-apps。
joint_trajectory_sender
受 joint_state_publisher_gui 启发
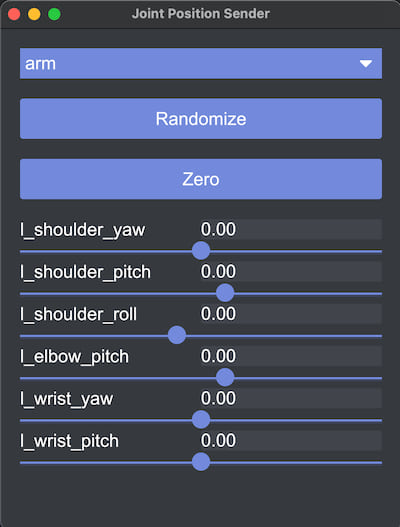
您可以使用此GUI,不仅限于ROS,任何需要的情况下,只要您实现了 arci::JointTrajectoryClient 并编写一个小型的二进制主函数。
robot_command
通用的CLI,用于访问 arci 机器人客户端。它不仅支持直接发送关节轨迹,还支持带自碰撞检查的反向运动学和导航。
格式
要格式化,请使用nightly rustfmt。
cargo +nightly fmt
许可
本软件受Apache License, Version 2.0 许可。
相关的openrr仓库
- k : 运动学库
- ros-nalgebra : rosrust nalgebra 转换生成器
- rrt : RRT-dual-connect 路径规划器
- trajectory : 轨迹插值器
- urdf-rs : URDF 解析器
- urdf-viz:URDF 可视化器
gear: (已弃用) 运动规划库,但现在它是 openrr-planner。
为什么选择OpenRR?
我们坚信Rust是机器人技术的未来。OpenRR是第一个由Rust编写,为Rust而生的机器人平台。它可以作为一个参考,为未来的机器人开发者,就像我们一样,打下基础。
贡献
我们非常感谢您的任何贡献!首先创建一个问题!
这里有一个Discord服务器。
使用OpenRR
您可以在以下链接中阅读教程书籍。
依赖关系
~29–72MB
~1.5M SLoC