12 个版本 (稳定版)
| 1.1.4 | 2024 年 4 月 26 日 |
|---|---|
| 1.1.3 | 2024 年 2 月 23 日 |
| 1.1.1 | 2024 年 1 月 22 日 |
| 1.0.1 | 2023 年 12 月 6 日 |
| 0.1.3 | 2023 年 12 月 4 日 |
在 机器人学 中排名 #5
每月下载量 64
335KB
8K SLoC
Ruckig
机器人和机器的瞬时运动生成。
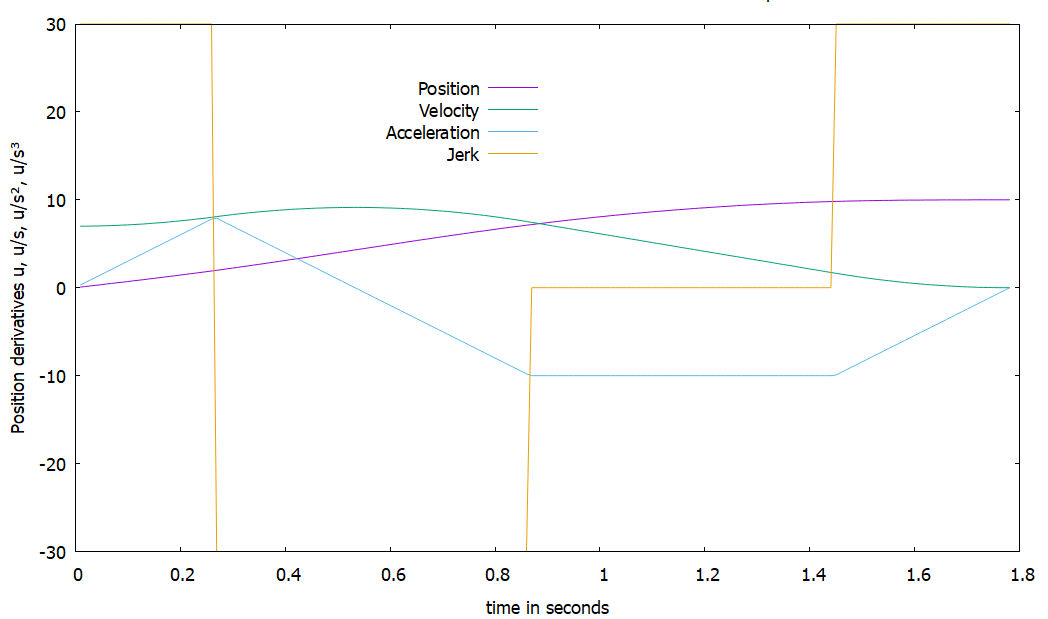
这是从 https://github.com/pantor/ruckig/ 仓库移植到 Rust 的版本。云客户端和专业功能尚未移植。示例使用 Gnuplot 来演示轨迹。
Ruckig 在线生成轨迹,使机器人和机器能够即时响应传感器输入。Ruckig 从任何受速度、加速度和加加速度约束的初始状态计算到目标点(具有位置、速度和加速度)的轨迹。除了目标状态,Ruckig 允许定义中间位置以跟随航点。对于状态到状态的运动,Ruckig 保证时间最优解。使用中间航点,Ruckig 联合计算路径及其时间参数化,从而比传统方法产生更快的轨迹。
更多信息可在 ruckig.com 和对应的论文 Jerk-limited Real-time Trajectory Generation with Arbitrary Target States 中找到,该论文被 2021 年的 Robotics: Science and Systems (RSS) 会议接受。
安装
cargo build --release
文档(不完整)
cargo doc --open
教程
让我们开始吧!
基于航点的轨迹生成
Ruckig 提供了三个主要接口类:Ruckig、InputParameter 和 OutputParameter 类。
首先,您需要使用 DOF 和 RuckigErrorHandler 作为模板参数创建一个 Ruckig 实例,并在构造函数中将 DOF 数量作为选项和控件周期(例如,以秒为单位)。
您可以选择使用模板参数来指定自由度(DOF)的数量,并使用堆栈分配,或者使用构造函数来指定DOF的数量,格式为 Option<usize>。如果您使用动态数量的DOF,则模板DOF参数必须设置为0以动态分配DOF。作为模板参数的任何大于0的数字都将导致省略动态DOF参数。在动态DOF分配的情况下,将构造函数的DOF参数设置为None是一种良好的做法。
use rsruckig::prelude::*;
// stack allocation using template parameter
let mut ruckig = Ruckig::<6, ThrowErrorHandler>::new(None, 0.01); // Number DoFs; control cycle in [s]
// dynamic allocation
let mut ruckig = Ruckig::<0, ThrowErrorHandler>::new(Some(6), 0.01); // Number DoFs; control cycle in [s]
已实现的错误处理器有
ThrowErrorHandler- 如果输入无效,则抛出带有详细原因的错误。IgnoreErrorHandler- 忽略错误并返回Ok(RuckigResult)。
要实现您自己的错误处理器,您需要实现 RuckigErrorHandler trait。
pub trait RuckigErrorHandler {
fn handle_validation_error(message: &str) -> Result<bool, RuckigError>;
fn handle_calculator_error(
message: &str,
result: RuckigResult,
) -> Result<RuckigResult, RuckigError>;
}
输入类型包含3块数据:当前状态、目标状态以及相应的运动学限制。
// Stack DOF allocation
let mut input = InputParameter::new(None); // Number DoFs
input.current_position = daov_stack![[0.2, ...];
input.current_velocity = daov_stack![0.1, ...];
input.current_acceleration = daov_stack![0.1, ...];
input.target_position = daov_stack![0.5, ...];
input.target_velocity = daov_stack![-0.1, ...];
input.target_acceleration = daov_stack![0.2, ...];
input.max_velocity = daov_stack![0.4, ...];
input.max_acceleration = daov_stack![1.0, ...];
input.max_jerk = daov_stack![4.0, ...];
let mut output: OutputParameter = OutputParameter::new(None);
// Dynamic DOF allocation
let mut input = InputParameter::new(Some(6)); // Number DoFs
input.current_position = daov_heap![0.2, ...];
input.current_velocity = daov_heap![0.1, ...];
input.current_acceleration = daov_heap![0.1, ...];
input.target_position = daov_heap![0.5, ...];
input.target_velocity = daov_heap![-0.1, ...];
input.target_acceleration = daov_heap![0.2, ...];
input.max_velocity = daov_heap![0.4, ...];
input.max_acceleration = daov_heap![1.0, ...];
input.max_jerk = daov_heap![4.0, ...];
let mut output: OutputParameter = OutputParameter::new(Some(6)); // Number DoFs
如果您只想有一个加速度限制的轨迹,您也可以省略 max_jerk 以及 current 和 target_acceleration 的值。给定所有输入和输出资源,我们可以在每个离散时间步迭代轨迹。对于大多数应用,此循环必须在实时线程中运行并控制实际硬件。
while ruckig.update(&input, &mut output).unwrap() == RuckigResult::Working {
// Make use of the new state here!
// e.g. robo.setJointPositions(output.new_position);
output.pass_to_input(&mut input); // Don't forget this!
}
在控制循环中,您需要根据计算出的轨迹更新输入参数的当前状态。因此,pass_to_input 方法将输出的新运动学状态复制到输入参数的当前运动学状态。如果在下一个步骤中当前状态不是预期的、预先计算出的轨迹,Ruckig将根据新的输入计算新的轨迹。当轨迹达到目标状态时,update 函数将返回 Result::Finished。
DataArrayOrVec
DataArrayOrVec 类型是一个固定大小数组或向量的包装器。它主要用于存储运动学状态。用户可以在堆栈和堆分配之间进行选择。堆栈分配更快,但DOF的数量必须在编译时已知。堆分配较慢,但DOF的数量可以在运行时设置。
pub enum DataArrayOrVec<T, const N: usize>
where T: std::fmt::Debug {
Stack([T; N]),
Heap(Vec<T>),
}
DataArrayOrVec 有两个关联的宏,以简化的形式简化实例化过程
daov_stack!daov_heap!
使用示例
// For stack allocation, using template parameter and array under the hood
let mut data = daov_stack![0.2, 0.3, 0.4];
// For heap allocation, using Vec under the hood
let mut dynamic_data = daov_heap![0.2, 0.3, 0.4];
data[0] = 0.5;
data[1] = 0.6;
data[2] = 0.7;
dynamic_data[0] = 0.5;
dynamic_data[1] = 0.6;
dynamic_data[2] = 0.7;
### Input Parameter
To go into more detail, the *InputParameter* type has following members:
current_position: DataArrayOrVec<f64, DOF>;
current_velocity: DataArrayOrVec<f64, DOF>; // Initialized to zero
current_acceleration: DataArrayOrVec<f64, DOF>; // Initialized to zero
target_position: DataArrayOrVec<f64, DOF>;
target_velocity: VDataArrayOrVec<f64, DOF>; // Initialized to zero
target_acceleration: DataArrayOrVec<f64, DOF>; // Initialized to zero
max_velocity: DataArrayOrVec<f64, DOF>;
max_acceleration: DataArrayOrVec<f64, DOF>;
max_jerk: DataArrayOrVec<f64, DOF>; // Initialized to infinity
min_velocity: Option<DataArrayOrVec<f64, DOF>>; // If not given, the negative maximum velocity will be used.
min_acceleration: Option<DataArrayOrVec<f64, DOF>>; // If not given, the negative maximum acceleration will be used.
enabled: Vec<bool>; // Initialized to true
minimum_duration: Option<f64>;
control_interface: ControlInterface; // The default position interface controls the full kinematic state.
synchronization: Synchronization; // Synchronization behavior of multiple DoFs
duration_discretization: DurationDiscretization; // Whether the duration should be a discrete multiple of the control cycle (off by default)
per_dof_control_interface: Option<Vec<ControlInterface>>; // Sets the control interface for each DoF individually, overwrites global control_interface
per_dof_synchronization: Option<Vec<Synchronization>>; // Sets the synchronization for each DoF individually, overwrites global synchronization
在当前状态、目标状态和约束的基础上,Ruckig还允许一些更高级的设置
- 可以指定 最小速度 和 加速度 - 这些应该是负数。如果没有提供,则将使用负的最大速度或加速度(类似于加速度限制)。例如,这在人机协作设置中可能很有用,其中对人类的速度限制不同。或者,当在不同移动坐标系之间切换时,如从传送带上取货。
- 您可以通过使用例如
per_section_max_velocity来覆盖全局运动学限制,以分别指定两个航点之间每个部分的限制。 - 如果DoF是 未启用 的,则在计算中将被忽略。Ruckig将为这些DoF输出一个具有恒定加速度的轨迹。
- 可以可选地给出一个 最小持续时间。请注意,Ruckig不能保证轨迹的精确持续时间,而只能保证最小持续时间。
- 可以轻松切换控制接口(位置或速度控制)。例如,可以使用速度接口轻松实现停止轨迹或视觉伺服。
- 实现了不同的同步行为(例如,相位、时间或无同步)。相位同步会导致直线运动。
- 轨迹持续时间可能被限制为控制周期的倍数。这样,在控制循环执行时,可以到达精确的状态。
输入验证
为了检查Ruckig在实际计算步骤之前能否生成轨迹,
ruckig.validate_input<E: RuckigErrorHandler>(input, check_current_state_within_limits, check_target_state_within_limits);
// returns Result<bool, RuckigError>. If RuckigErrorHandler is ThrowErrorHandler, it returns Err(RuckigError::ValidationError) in case of error.
// If the error handler is IgnoreErrorHandler, it returns Ok(true) if the input is valid, and Ok(false) if the input is invalid.
如果输入无效,则抛出带有详细原因的错误。您必须通过例如以下方式设置模板参数ruckig.validate_input<ThrowErrorHandler>(...) 。这两个布尔参数检查当前状态或目标状态是否在限制范围内。检查包括一个典型的抛出异常:当当前状态处于最大速度时,任何正加速度都不可避免地会在未来的时间步中导致速度违规。通常,这种条件满足时
Abs(acceleration) <= Sqrt(2 * max_jerk * (max_velocity - Abs(velocity))).
如果两个参数都设置为true,则计算出的轨迹在整个持续期间保证在运动学限制内。此外,请注意,由于数值原因,输入存在范围限制,下面将提供更多详细信息。
RuckigResult 类型
Ruckig类的 update 函数返回一个Result类型,指示算法的当前状态。这可以是工作、如果轨迹已完成,则为完成,或者在计算过程中出现错误时为错误类型。结果类型可以像标准整数一样进行比较。
| 状态 | 错误代码 |
|---|---|
| 工作 | 0 |
| 完成 | 1 |
| 错误 | -1 |
| 无效输入错误 | -100 |
| 轨迹持续时间错误 | -101 |
| 位置限制错误 | -102 |
| 执行时间计算错误 | -110 |
| 同步计算错误 | -111 |
输出参数
输出类包括新的运动学状态和整体轨迹。
new_position: DataArrayOrVec<f64, DOF>;
new_velocity: DataArrayOrVec<f64, DOF>;
new_acceleration: DataArrayOrVec<f64, DOF>;
trajectory: Trajectory; // The current trajectory
time: f64; // The current, auto-incremented time. Reset to 0 at a new calculation.
new_section: usize; // Index of the section between two (possibly filtered) intermediate positions.
did_section_change: bool; // Was a new section reached in the last cycle?
new_calculation: bool; // Whether a new calculation was performed in the last cycle
was_calculation_interrupted: bool; // Was the trajectory calculation interrupted? (only in Pro Version)
calculation_duration: f64; // Duration of the calculation in the last cycle [µs]
此外,轨迹结构体还有一系列有用的参数和方法。
duration: f64; // Duration of the trajectory
independent_min_durations: DataArrayOrVec<f64, DOF>; // Time-optimal profile for each independent DoF
<...> pub fn at_time(
&self,
time: f64,
new_position: &mut Option<&mut DataArrayOrVec<f64, DOF>>,
new_velocity: &mut Option<&mut DataArrayOrVec<f64, DOF>>,
new_acceleration: &mut Option<&mut DataArrayOrVec<f64, DOF>>,
new_jerk: &mut Option<&mut DataArrayOrVec<f64, DOF>>,
new_section: &mut Option<usize>,
); // Get the kinematic state of the trajectory at a given time
<...> get_position_extrema(); // Returns information about the position extrema and their times
有关确切签名的详细信息,请参阅API文档。(仅限C++版本)
离线计算
Ruckig还支持离线方法来计算轨迹
result = ruckig.calculate(input, trajectory); // Returns Result<RuckigResult, RuckigError>
当只使用此方法时,Ruckig 构造函数不需要控制周期(delta_time)作为参数。但是,如果提供了,Ruckig支持使用以下方式遍历轨迹
while (ruckig.update(&input, &mut output).unwrap() == RuckigResult::Working {
// Make use of the new state here!
// e.g. robot.setJointPositions(output.new_position);
}
测试和数值稳定性
当前的测试套件验证了超过5,000,000,000个随机轨迹以及许多其他边缘情况。测试数值精确度以确保最终位置和最终速度在1e-8内,最终加速度在1e-10内,速度、加速度和加加速度限制在1e-12的数值误差内。这些都是绝对值 - 我们建议调整您的输入,使其与系统的所需精度相对应。例如,对于大多数现实世界系统,我们建议使用[m](例如,而不是例如[mm]),因为1e-8m对于实际轨迹生成足够精确。此外,所有运动学限制应低于1e12。最大支持的轨迹持续时间是7e3。请注意,Ruckig还会输出此范围之外的价值,但无法保证正确性。Ruckig Pro版本具有额外的工具来增加数值范围并提高可靠性。
开发
原始的Ruckig是用C++17编写的。它持续在以下版本上进行测试:ubuntu-latest,macos-latest,和windows-latest
Rust版本是原始C++版本的移植,不包括专业功能和云客户端。
Rust移植待办事项
- 添加更多测试
- 将RuckigError转换为Rust枚举
- 添加更多示例
- 添加更多文档
- 进一步优化性能
引用
@article{berscheid2021jerk,
title={Jerk-limited Real-time Trajectory Generation with Arbitrary Target States},
author={Berscheid, Lars and Kr{\"o}ger, Torsten},
journal={Robotics: Science and Systems XVII},
year={2021}
}
依赖项
~69KB