14 个版本
| 0.5.3 | 2023 年 4 月 1 日 |
|---|---|
| 0.5.2 | 2023 年 3 月 31 日 |
| 0.3.3 | 2021 年 3 月 14 日 |
| 0.3.2 | 2020 年 8 月 30 日 |
| 0.1.0 | 2020 年 8 月 29 日 |
#186 in 算法
900 个月下载量
在 6 个 crate 中使用 (4 个直接使用)
30KB
325 行
一个用 Rust 编写的矩形打包器,用于将许多矩形压缩进一个更大的矩形中。它主要考虑精灵打包(例如,创建精灵图集或 CSS 图像表)。
支持每个项目 90° 旋转。
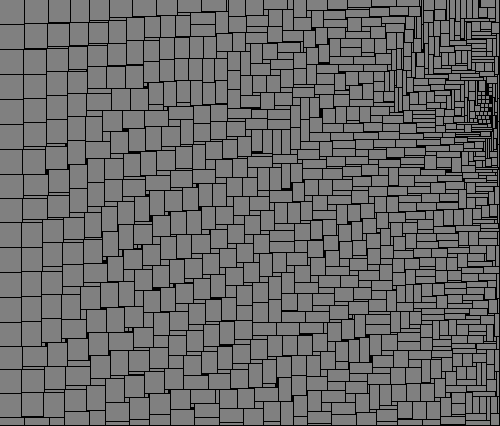
打包了 1200 个矩形,覆盖率约为 ~99%
示例
use crunch::{pack, Rect, Item, Rotation};
use std::iter::*;
fn main() {
// The 15x15 container we'll be packing our items into
let container = Rect::of_size(15, 15);
// Our items to pack. The user-data here are chars,
// but could be any copyable type
let items = [
Item::new('A', 2, 9, Rotation::Allowed),
Item::new('B', 3, 8, Rotation::Allowed),
Item::new('C', 4, 7, Rotation::Allowed),
Item::new('D', 5, 6, Rotation::Allowed),
Item::new('E', 6, 5, Rotation::Allowed),
Item::new('F', 7, 4, Rotation::Allowed),
Item::new('G', 8, 3, Rotation::Allowed),
Item::new('H', 9, 2, Rotation::Allowed),
];
// Now we can try to pack all the items into this container
let result = pack(container, items);
let packed = match result {
Ok(all_packed) => all_packed,
Err(some_packed) => some_packed,
};
// To display the results, let's create a 15x15 grid of '.' characters
let mut data : Vec<char> =
repeat(repeat('.').take(container.w).chain(once('\n')))
.take(container.h)
.flatten()
.collect();
// We can iterate through each (rect, data) pair that was packed
for item in &packed {
for x in item.rect.x..item.rect.right() {
for y in item.rect.y..item.rect.bottom() {
data[y * (container.w + 1) + x] = item.data;
}
}
}
// The items packed very efficiently, using 90% of the 15x15
// container's space. You'll notice that some ('H', for example)
// were able to rotate to fit.
println!("{}", String::from_iter(data));
// EEEEEEDDDDDDBBB
// EEEEEEDDDDDDBBB
// EEEEEEDDDDDDBBB
// EEEEEEDDDDDDBBB
// EEEEEEDDDDDDBBB
// FFFFCCCCHHAABBB
// FFFFCCCCHHAABBB
// FFFFCCCCHHAABBB
// FFFFCCCCHHAA...
// FFFFCCCCHHAA...
// FFFFCCCCHHAA...
// FFFFCCCCHHAA...
// GGGGGGGGHHAA...
// GGGGGGGGHHAA...
// GGGGGGGG.......
}
如果你正在打包纹理,你也可以使用 pack_into_po2() 辅助函数,它将找到可以装入项目的最小 2 的幂矩形(如果你的渲染系统关心这一点,这很好)。
它是如何工作的?
解释起来有点复杂,但算法使用了一个 节点 树。根节点是初始容器矩形。当第一个项目打包时,它会将容器分割成 0-4 个可能的子容器,或 叶节点。每次我们插入一个新项目时,每个叶节点都会根据其将项目打包的效率(使用空间)给每个叶节点一个 分数,然后我们将项目插入到得分最高的叶节点中。然后那个叶节点被分割。
算法的技巧在于节点树是如何分割自己的。基本上,项目被装入到分配给它打包的叶节点的左上角。然后,我们沿着树向下 碰撞 该矩形,从根节点开始。然后分割与新打包的矩形重叠的每个叶节点,而不仅仅是矩形打包的节点。
分割的工作方式是,给定节点与打包项目的重叠,我们从它中创建尽可能多的角适配矩形。例如
┏━┱───┐ ┌─┲━━━┓ ┌─────┐
┃ ┃ │ │ ┃ ┃ │ │
┡━┛ │ │ ┃ ┃ ┢━━━━━┪
│ │ splits into: │ ┃ ┃ and ┃ ┃
│ │ │ ┃ ┃ ┃ ┃
│ │ │ ┃ ┃ ┃ ┃
└─────┘ └─┺━━━┛ ┗━━━━━┛
这些分裂节点允许重叠,所以我们并不是在逐个细分根节点,而是在创建新的潜在包装路径。由于它们可以重叠,节点分裂可能会在树的上层节点内完全包含一个叶节点。当这种情况发生时,我们不会创建那个叶节点,因为树上的节点已经完全占据了那个空间。
随着我们包装越来越多的矩形,这些评分检查和碰撞检查变得越来越昂贵,因为叶节点的数量迅速增加。你可能会发现叶节点的数量是你要包装的项目数量的2倍或更多。
树结构是我们能够如此高效地完成工作的原因,而且在包装之前预先对物品进行排序,以便首先包装最大的物品。在发生碰撞时,我们可以逐个检查分裂处的碰撞,并且树的每一层都会防止我们不得不检查大量叶节点的重叠。我之前版本的这种方法只是扫描整个扁平的叶节点列表,...它要慢得多。
贡献
如果你找到了使其更快或更节省内存的方法,我很乐意接受pull请求。如果你有一个不太明显的速度改进变更,我会很感激你提供基准测试,这样我可以看到效果。