1 个不稳定版本
| 0.4.0 | 2021年9月24日 |
|---|
#19 在 #tree-traversal
26 每月下载量
用于 tref
53KB
870 行
SOCAREL
Rust crate,用于生成、操作和遍历树。
它提供了8种不同遍历算法的迭代器。
以O(1)的复杂度添加和删除节点。以O(p)的复杂度在路径中查找节点(其中p是路径长度)。
支持自定义节点模型以创建复杂的树格式。
用法 & 文档
与任何crate一样,使用cargo生成文档
cargo doc --open
crate
在 crates.io 下载crate
示例
查看文件 src/main.rs 和 src/tests.rs 了解用法示例。
名称
Socarel 是一个加泰罗尼亚语单词,由 soca(树干)和 rel(根)组成。意思是完全的,全部的,根据上下文可以理解为纯粹的,真正的。
lib.rs:
SOCAREL
Socarel 是一个用于生成、操作和遍历树的库。
它提供了8种不同遍历算法的迭代器。
以O(1)的复杂度添加和删除节点。以O(p)的复杂度在路径中查找节点(其中p是路径长度)。
支持自定义节点模型以创建复杂的树格式。
示例
要生成如下所示的树
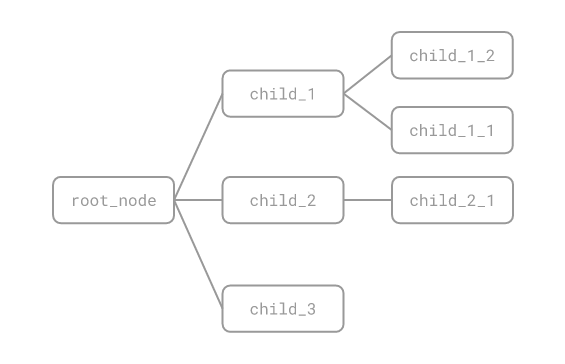
我们会这样做
use socarel::*;
let mut tree = <Tree>::new();
let _root_node = tree.set_root("root_node").unwrap();
let _child_1 = tree.link_node("child_1", _root_node).unwrap();
let _child_2 = tree.link_node("child_2", _root_node).unwrap();
let _child_3 = tree.link_node("child_3", _root_node).unwrap();
let _child_1_1 = tree.link_node("child_1_1", _child_1).unwrap();
let _child_1_2 = tree.link_node("child_1_2", _child_1).unwrap();
let _child_2_1 = tree.link_node("child_2_1", _child_2).unwrap();
然后你可以将你的树存储在森林中
let mut forest = <Forest>::new();
forest.add_tree("my_tree", tree);
稍后可以检索它
let tree = forest.get_tree("my_tree").unwrap();
或迭代森林以获取所有树
for (tree_id, tree) in forest.iter() {
// ...
}
编辑树
当然,在创建后也可以修改树,当然是通过链接更多节点,就像我们之前看到的那样,但也可以取消链接它们
let tree = forest.get_mut_tree("my_tree").unwrap();
tree.unlink_node(_child_1);
tree.unlink_node(_child_2);
取消链接后,节点仍然在存储在 Tree 内的节点数组中,但无法访问,因为它与树的其他部分断开连接。并且任何取消链接节点的子节点也无法访问。因此,在两次取消链接操作之后,树将只剩下两个节点:root_node 和 child_3。
但我们为什么还留下这些节点呢?我们在浪费内存!是的,但替代方案是递归删除所有节点,这可能是昂贵的,实际上也是不可预测的,因为我们不知道有多少子节点。为了保持取消链接操作快速 / O(1),我们需要这样做。
我们还可以在不修改链接属性的情况下更改节点的内容
tree.update_node("new_root_node", _root_node);
迭代器
遍历树有很多方法,这就是为什么 Socarel 提供了多个迭代器,每个迭代器实现一种遍历算法。让我们看看最广泛使用的一种,BFS
for (node, node_index) in tree.iterators().bfs() {
// ...
}
查看IterInterface以获取迭代器的完整列表。
查找节点
有时为了找到节点,我们不需要迭代器,因为我们知道它在树结构中的位置
let _node = tree.find_node(&["root_node", "child_1", "child_1_1"]).unwrap();
当可能时,使用[Tree::find_node()]始终是更好的选择,因为其复杂度为O(p)(p = 路径长度),而大多数遍历算法的复杂度为O(n)(n = 树中的节点数量)。
自定义节点
Tree包含一个Node数组,但当前的节点结构只提供了关于其在树中位置的信息,不提供存储内容的方式。内容存储在另一个实现NodeContent trait 的结构体中。
Socarel提供了一个默认实现RawNode,在未提供其他类型时使用。这就是我们之前创建树和森林实例的原因
let tree = <Tree>::new();
以及为什么它无法编译的原因
let tree = Tree::new();
因为Tree被定义为一个实现了NodeContent的泛型,它有一个默认类型RawNode。因此,我们也可以创建这样的树
let tree = Tree::<RawNode>::new();
但我们可以实现自己的节点内容来模拟我们想要的任何东西。想象一下,我们想要一个具有节点连接权重的树。我们可以定义类似的东西
struct WeightNode {
content: String,
weight: u32
}
impl WeightNode {
fn get_weight(&self) -> u32 {
self.weight
}
}
impl NodeContent for WeightNode {
// We parse the node content and return None if not a valid format
fn new(content: &str) -> Option<Self> {
let vec: Vec<&str> = content.split(':').collect();
if vec.len() == 2 {
match vec[0].trim().parse() {
Ok(num) => Some(Self {
content: String::from(vec[1]),
weight: num
}),
Err(_) => None
}
}
else {
None
}
}
fn get_val(&self) -> &str {
&self.content
}
fn gen_content(&self) -> String {
format!("{}:{}", self.weight, self.content)
}
}
现在我们可以在树中使用我们全新的节点内容
let mut tree = Tree::<WeightNode>::new();
let _root = tree.set_root("0:my root node").unwrap();
let _node_1 = tree.link_node("10:my node 1", _root).unwrap();
let _node_1_1 = tree.link_node("100:child of my node 1", _node_1).unwrap();
for (node, _) in tree.iterators().bfs() {
let cref = node.get_content_ref();
println!("Node content = `{}` weight = {}", cref.get_val(), cref.get_weight());
}