9个版本
| 0.0.9 | 2024年7月1日 |
|---|---|
| 0.0.8 | 2024年7月1日 |
| 0.0.7 | 2024年6月14日 |
274 在 游戏开发 中排名
每月469次下载
1MB
411 行
RePath
![]()
![]()
![]()
RePath是一个快速且高效的路径查找库。它利用A*算法,在OBJ导航网格上提供快速且精确的路径查找解决方案,这对于在实时环境中管理大量NPC至关重要。
RePath是为Respark开发的,Respark是一款即将推出的开放世界MMO射击游戏。Respark结合了激烈的战斗、战略游戏和广阔的动态世界。加入我们的社区Discord,以获取最新新闻和发展动态。
描述
RePath是为了解决MMO游戏服务器中高性能路径查找的需求而开发的。鉴于游戏世界的复杂性和规模,路径查找可能会成为一个瓶颈。RePath通过预计算、缓存和高级搜索算法的组合来优化此过程,确保即使在需求较高的场景下也能快速准确地查找路径。它还可以用于其他需要高效路径查找的应用,如机器人技术、模拟和人工智能。
为什么它这么快
RePath的速度来自其预计算、高效的搜索算法和智能缓存的组合。通过预计算路径并将它们存储在LRU缓存中,RePath可以快速返回常见的路径查找查询,而无需重新计算。
特性
- A*路径查找算法:高效且精确的路径查找。
- 预计算:使用Rayon并行快速预计算随机路径,并将它们存储在缓存中。
- LRU缓存:高效的内存使用和快速访问最近路径。
- 可扩展:处理大型游戏世界和大量NPC。
- 多线程:利用多个线程进行预计算和路径查找。
使用
将RePath添加到您的项目中
将RePath添加到您的Cargo.toml
[dependencies]
repath = "0.0.9"
请确保您在项目目录中有一个包含导航网格的OBJ文件。
然后在您的项目中使用它
use repath::{RePathfinder, settings::RePathSettings};
fn main() {
// Create a new RePathSettings instance with custom settings
let settings = RePathSettings {
navmesh_filename: "navmesh_varied.obj".to_string(), // Path to the navmesh file in Wavefront OBJ format
precompute_radius: 25.0, // Higher this value, the longer it takes to precompute paths but faster pathfinding for long distances
total_precompute_pairs: 1000, // Higher this value, the longer it takes to precompute paths but faster pathfinding
cache_capacity: 1000, // Higher this value, the more paths can be stored in cache but more memory usage
use_precomputed_cache: true, // Set to false to disable precomputation of paths
};
// Create a new RePathfinder instance
let pathfinder = RePathfinder::new(settings);
// Define start and end coordinates for pathfinding
let start_coords = (0.0, 0.0, 0.0);
let end_coords = (10.0, 10.0, 10.0);
// Find a path from start to end coordinates using single thread (good for short distances)
if let Some(path) = pathfinder.find_path(start_coords, end_coords) {
println!("Found path: {:?}", path);
} else {
println!("No path found.");
}
// Find a path from start to end coordinates using multiple threads (good for long distances)
// This should not be used for short distances as it can be slower than single thread because of segmentation and multithreading overhead
let segment_count = 2; // Splits the path into two segments and calculates them in parallel
if let Some(path) = pathfinder.find_path_multithreaded(start_coords, end_coords, segment_count) {
println!("Found path: {:?}", path);
} else {
println!("No path found.");
}
}
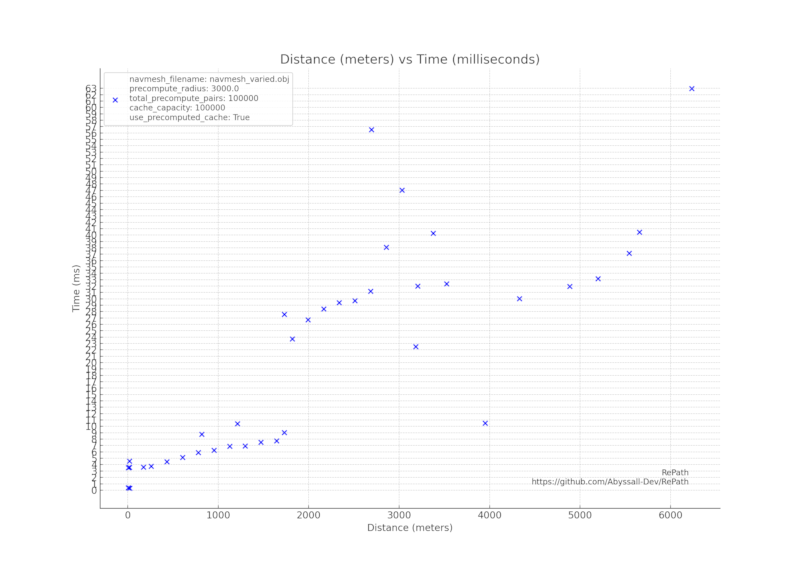
基准 - 单线程路径查找
以下图表显示了RePath在路径查找场景中的性能。基准测试是在i7-9700K CPU和16GB DDR4 RAM上进行的,这些设置如下
- 导航网格大小:4000 x 4000米
- 导航网格顶点:40 401
- 导航网格面:80 000
- 预计算半径:3 000米
- 总预计算对:100 000
- 缓存容量:100 000
- 使用预计算缓存:true
距离与时间
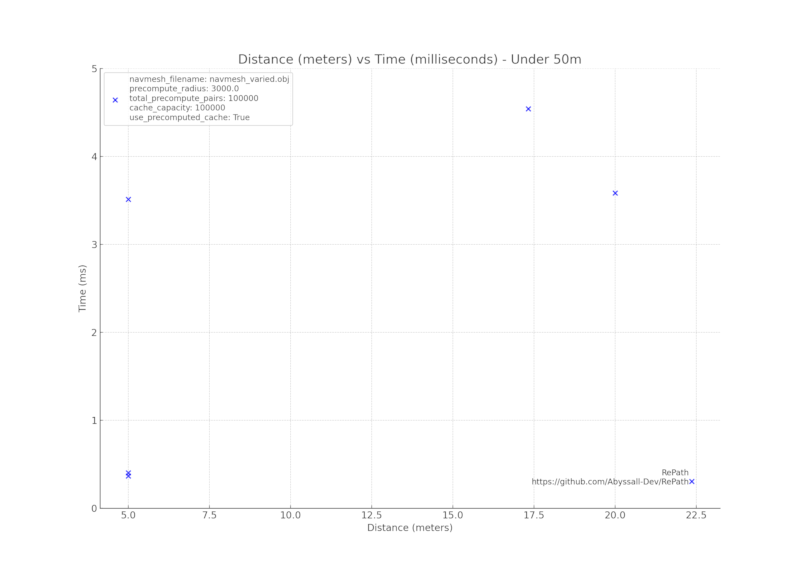
距离与时间(距离小于50米)
结果可能差异很大,这取决于路径是否已经被缓存。简而言之,找到的路径越多,未来的路径搜索将越快。
预计算目前处于实验阶段,并且似乎好处并不大,因为在大型地图上,找到相同路径的可能性非常低。然而,对于小型地图或顶点和面较少的navmesh,这可能很有用。对于短距离,您可以得到亚毫秒级的路径搜索时间。
您可以使用find_path_multithreaded方法并行计算路径。这对于长距离很有用,但不建议用于短距离,因为将路径分割成段并在并行计算中会产生开销。
许可证
RePath遵循MIT许可证。有关详细信息,请参阅LICENSE文件。
依赖项
~6MB
~102K SLoC